








Бытовая электроника
OpenCR1.0 OpenCR Оригинальный заводской контроллер ROS Robot Opencr Turtlebot3 Arduino MPU9250 STM32 IMU аксессуар с открытым исходным кодом
Оригинальная корейская версия выглядит следующим образом: Особенности
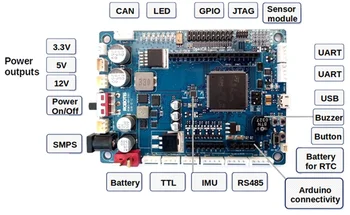
OpenCR1.0 (модуль управления с открытым исходным кодом для ROS) - это контроллер робота с открытым исходным кодом, встроенный в мощный MCU из линейки ARM Cortex-M7.
Аппаратные средства, программное обеспечение, схемы, описание печатной платы, спецификация и исходные коды встроенного программного обеспечения OpenCR1.0,
основные контроллеры, используемые в официальной образовательной платформе ROS TurtleBot3, доступны и открыты для широкой публики.
Поддерживает RS-485 и TTL для управления Dynamixels, а также предлагает UART, CAN и множество других коммуникационных сред, также доступны инструменты разработки, такие как Arduino IDE.
Его преимущество заключается в возможности работать более мощно при использовании с хост-контроллером, таким как SBC (одноплатный компьютер).
Он предоставляет различные эксклюзивные исходные тексты на основе ROS, чтобы вы могли максимально использовать функции OpenCR1.0 при использовании ROS.Компоненты пакета
OpenCR1.0
1
Кабель USB Micro B
1
Технические характеристики
Микроконтроллер
STM32F746ZGT6 / 32-разрядный ARM Cortex®-M7 с FPU (216 МГц, 462DMIPS)
Датчики
3 Оси гироскопа, 3 оси акселерометра, 3 оси магнитометра (MPU9250)
Программатор
Разъем ARM Cortex 10pin JTAG / SWD
Обновление встроенного ПО USB-устройства (DFU)
Последовательный
Удлинительные контакты
32 контакта (L 14, R 18) * Подключение к Arduino
Модуль датчика x 4 контакта
Удлинительный разъем x 18 контактов
Схемы связи
USB (разъем Micro-B USB/USB 2.0/Хост/Периферийное устройство/OTG)
TTL (B3B-EH-A / Dynamixel)
RS485 (B4B-EH-A / Dynamixel)
UART x 2 (20010WS-04)
CAN (20010WS-04)
Светодиоды и кнопки
LD2 (красный/зеленый): связь по USB
Индикатор пользователя x 4: LD3 (красный), LD4 (зеленый), LD5 (синий)
Кнопка пользователя x 2
Питание
Внешний источник входного сигнала
5 В (USB VBUS), 7-24 В (аккумулятор или SMPS)
Батарея по умолчанию: LI-PO 11,1 В 1800 мАч 19,98 Втч
SMPS по умолчанию: 12 В 5A
Внешний источник выходного сигнала
12V@1A (SMW250-02), 5V @4A (5267-02A), 3.3V@800mA (20010WS-02)
Разъем для подключения внешнего аккумулятора для RTC (часов реального времени) (Molex 53047-0210)
Индикатор питания: LD1 (красный, питание включено 3,3 В)
Кнопка сброса x 1 (для сброса питания платы)
Выключатель питания x 1
Размеры
105 (Ш) X 75 (Г) мм
Масса
60 г Совместимые продукты
Dynamixel X-Series
Серия Dynamixel AX/MX (требуется трансформируемый кабель Molex-JST)
Серия Dynamixel PRO (требуется трансформируемый кабель Molex-JST)
Датчик Robotis
Сделано в Китае версия следующая:
Ваш адрес электронной почты опубликован не будет. Обязательные поля отмечены *
- Номер модели : OpenCR1.0
- Происхождение : KR (происхождение)
- Фирменное наименование : FaseLase
- Способ связи : Другое
Теги: заводской контроллер ros robot opencr
Сопутствующие товары

Бытовая электроника
мини-лазерная маркировочная машина 20 Вт, волоконно-лазерная гравировальная машина для металла/нержавеющей стали/ювелирных изделий
detail_decorate_root #.magic-0{border-bottom-style:solid;border-bottom-color:#53647a;font-family:roboto;font-size:24px;color:#53647a;font-style:normal;border-bottom-width:2px;padding-top:8px;padding-bottom:4px}#detail_decorate_root .магия-1{вертикального выравнивания:сверху}#detail_decorate_root
Бытовая электроника
YunYi Firstrate FST100-UV-A 4-20 мА 0-5 В RS485 Выход ультрафиолетового излучения УФ-датчик
описание продукта параметры продукта степень защиты корпуса ip67 питание от 10-30 в постоянного тока диапазон интенсивности ультрафиолетового излучения 0-15 мвт • см-2 разрешение
Бытовая электроника
Тестовое приспособление для обнаружения неисправных чипов серии T2T плата устройства обнаружения с SD-картами в комплекте
здравствуйте, дорогой покупатель, добро пожаловать в наш магазин.если вам нужны другие модели этого товара, пожалуйста, свяжитесь со мной, и я вышлю вам ссылку на товар для покупки! электронная
Бытовая электроника
Разблокировка 4g Lte роутера Беспроводной WiFi портативный модем Наружная карта Mifi слот sim мини карманная точка доступа 150 Мбит/с Ретранслятор 300 H6j5
описание: благодаря мини-размеру 4g wifi-маршрутизатор станет идеальным выбором для вас в дороге. соедините wi-fi и обеспечьте безопасный доступ к сети со своими семьями
Бытовая электроника
Термометры для Духовки из Нержавеющей Стали, Барбекю, Коптильня, Гриль, Биметаллический термометр, Датчик Температуры с Двойным Датчиком, Инструменты Для Приготовления Пищи на 500 Градусов
барбекю из нержавеющей стали, коптильня, гриль, биметаллический термометр, датчик температуры с двойным датчиком, инструменты для приготовления пищи на 350 градусов, оптовая
Бытовая электроника
Zemismart WiFi Tuya Smart Life Мотор для Штор с Трубкой 36 37 мм Alexa Google Home Control Роликовые Жалюзи С Моторизованным Двигателем Затвора
zemismart умный дом wi-fi tuya smart life мотор для штор для трубки 36, 37, 38 мм alexa google home control роликовые жалюзи с моторизованным двигателем затвора -для товара из россии или бельгии пульт
Бытовая электроника
Аккумулятор Lipo для DJI Phantom 4 Intelligent Flight Battery
мой друг, добро пожаловать в наш магазин, если вам нужны другие модели этого товара, пожалуйста, свяжитесь со мной, я вышлю ссылку на товар, чтобы вы могли купить! #detail_decorate_root .magic-1{ширина:
Бытовая электроника
Дешевая цена по Прейскуранту завода изготовителя Льдогенератор Столешница С Дозатором воды Льдогенератор Машина С Низким Энергопотреблением Домашний Льдогенератор
мой друг, добро пожаловать в наш магазин, если вам нужны другие модели этого товара, пожалуйста, свяжитесь со мной, я вышлю ссылку на товар, чтобы вы могли купить! detail_decorate_root#.магия-0{ширина:750px}
Бытовая электроника
универсальный автомобильный DVD-плеер с сенсорным экраном 7 дюймов, FM AM, MP5, радио, RDS, GPS-устройство с DSP, автомобильный навигационный плеер для универсального автомобиля
мой друг, добро пожаловать в наш магазин, если вам нужны другие модели этого товара, пожалуйста, свяжитесь со мной, я вышлю ссылку на товар, чтобы вы могли купить!whatsapp+8619330216441 #detail_decorate_root
Бытовая электроника
Датчики дверей и окон Tuya Smart Zigbee, Домашняя Сигнализация, Детектор открытия/закрытия двери, Интеллектуальный контроль жизни через Alexa Google Home
примечание: для использования этого продукта zigbee требуется шлюз (концентратор) zigbee!!! примечание: для использования этого продукта zigbee требуется шлюз (концентратор) zigbee!!! примечание:
Бытовая электроника
OEM ODM KYYSLB 750 Вт 4-16ом Высокой Мощности 5.1 Hi-Fi Blueteeth Amplificador Сабвуфер Усилитель Караоке для домашнего Кинотеатра Без потерь
друзья, добро пожаловать в наш магазин, если вам нужны другие модели этого товара, пожалуйста, свяжитесь со мной, я вышлю ссылку на товар для покупки!вы также можете добавить
Бытовая электроника
Ультразвуковой цифровой дефектоскоп Yun Yi GR900 Диапазон измерения 0-10000 мм Автоматический дисплей GR-900 Точное местоположение Имеет значение
модель gr900 диапазон измерения 0-10000 мм скорость материала 1000 м/с ~ 15000 м/с коэффициент усиления 0-130 дб рабочая частота 0,2-20 мгц память
Бытовая электроника
Многорежимный шлюз Smart Life, беспроводной WiFi, Zigbee Tuya, пульт дистанционного управления, Сетчатый мост для дома, Поддержка Alexa Google Home
smart life многорежимный шлюз беспроводной wifi zigbee tuya пульт дистанционного управления домашний сетчатый мост поддержка alexa google home описание: приложение: tuya/ smart life 1. управление
Бытовая электроника
Intellithings Электрический Двигатель для рулонных штор 36 мм 37 мм 38 мм Трубчатых жалюзи Управление затвором с помощью переключателя Подходит для 110 В- 240 В
intellithings электрический двигатель для рулонных штор 36 мм 37 мм 38 мм трубчатых жалюзи управление затвором с помощью переключателя подходит для 110 в- 240 в характеристики: работайте
Бытовая электроника
Модуль определения местоположения WisBlock GNSS | RAK1910 | RAKwireless

Бытовая электроника
Горячая распродажа, аккумулятор Lifepo4, портативная электростанция 220 В, ИБП, наружный аккумулятор для хранения солнечной энергии
привет, друг!спасибо за проявленный интерес к моему продукту.я отвечу вам, если у вас возникнут какие-либо вопросы о моих продуктах.пожалуйста, добавьте мой whatsapp: + 86 15074076993, если
Бытовая электроника
Новая мужская футболка Xiaomi YOUPIN из мерсеризованного хлопка, удобный дышащий, впитывающий пот однотонный топ с коротким рукавом 557
новая мужская футболка xiaomi youpin из мерсеризованного хлопка, удобный дышащий, впитывающий пот однотонный топ с коротким рукавом примечание: этот продукт xiaomi youpin, на продукте
Бытовая электроника
USB-увлажнитель воздуха, распыляющий красочный ночник, спальня, офис, Настольный Автомобильный увлажнитель для сна, Модный креативный подарок
usb-увлажнитель воздуха, распыляющий красочный ночник, спальня, офис, настольный портативный автомобильный увлажнитель, модный креативный рождественский подарок hansel модель
Бытовая электроника
XY Screens UST ALR PET Crystal Xiao Mi Wemax One Pro Экран проектора ALR со Сверхкоротким ходом 50 80 90 92 100
мой друг, добро пожаловать в наш магазин, если вам нужны другие модели этого товара, пожалуйста, свяжитесь со мной, я вышлю ссылку на товар, чтобы вы могли купить! приведенная
Бытовая электроника
Технические детали MOC Функции питания Батарейный блок AA Чехол Совместим со строительными блоками legoed 8881 8883 Автомобиль-робот
технические детали moc функции питания батарейный блок aa чехол совместим со строительными блоками legoed 8881 8883 робот автомобиль прямая поставка, оптовый заказ и индивидуальный